近日,js345线路检测医疗机器人研究院杨广中教授在Advanced Functional Materials杂志上发表研究论文“Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite”。(DOI: 10.1002/adfm.202002510)
当前软材料、新的制备技术以及连续驱动的研究不断取得新进展,为微型机器人的研究和发展带来新的动能。在需要精细操作的实际应用中,例如显微外科手术或者探索微小尺度生物样品时,微型机器人都可得到广泛的应用。形状记忆效应具有驱动机制简单等优势,是一种微小尺度下非常有发展前景的驱动机制。但对于亚毫米级的装置,由于受制备工艺的限制,使用形状记忆合金驱动器很难实现复杂且大范围的移动。
此项研究提出了一种利用双光子打印制备而成的小型智能软复合驱动器的设计与制造,可通过改变支架层压的方向来改变形变模式,同时通过沉积在驱动器内部的碳纳米管层的局部电热效应来控制驱动。此研究中的微驱动器设计可产生390 µN的力,实现高达80°的弯曲角度,并展示了使用单臂和双臂装置来提起与抓取物体的能力。
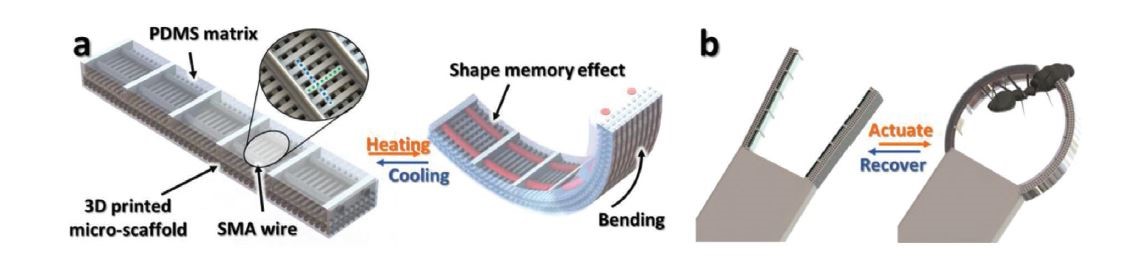
图1 此项研究中微型软驱动器的设计原理与工作机制
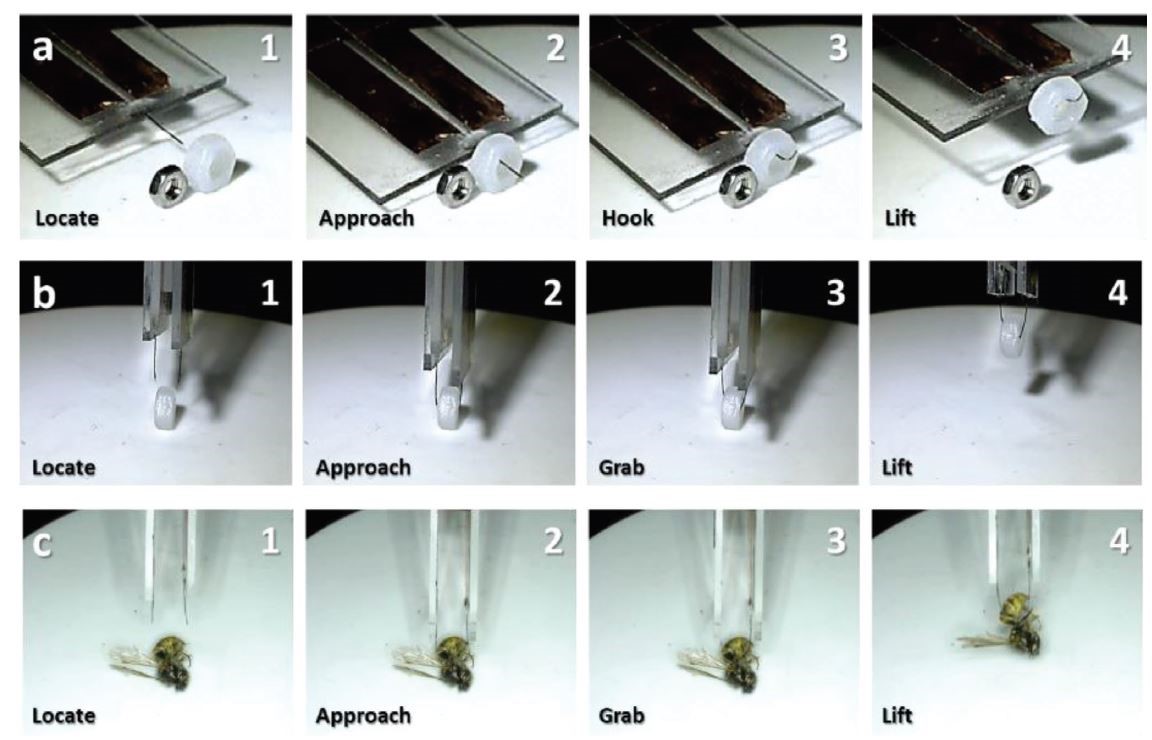
图2 此研究中微驱动器操控物体的能力:可单臂提起物体,双臂抓取并提起物体(物体重量80 mg)与抓取黄蜂,并不会对抓取物带来任何的损伤
论文链接:https://doi.org/10.1002/adfm.202002510









